



I haven't updated the help files yet for the new SD parameters, but here's a simlified view for those vehicles that don't have variable camshaft or switched (active) intake manifold.
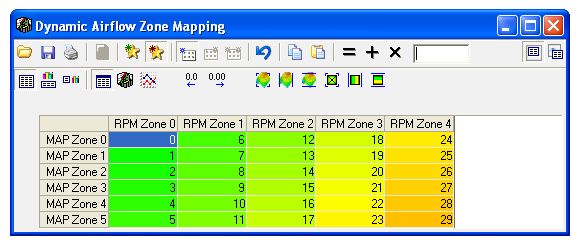
As you can see it is far from simpleBascially the engine operation is divided up into 30 "zones" and then there is a coefficient for each zone that forms an equation for the PCM to calculate the VE value (instead of looking it up in a traditional table). The simplified equation is (leaving out all the variable cam stuff that isn't used):
VE = Constant + KMap².MAP² + KMap.MAP + KMapRPM.MAP.RPM + KRpm².RPM² + KRpm.RPM
where:
- Kxxx is the coefficient from the current zone
- MAP² is MAP squared
- MAP is MAP
- RPM is RPM
- RPM² is RPM squared
The way this kind of thing is typically done in a mathematical sense is you create the solution matrix that they are trying to achieve (ie. in this case the multi-dimensional VE table). Then put that into a math package like Matlab etc. that then churns out the filter coefficient matrix, which is then put into the calibration tables.
It is completely non-intuitive, but you could construct a spreadsheet or something to calculate the VE value at given RPM and MAP values for any set of coefficients (using the formula above). For those 4cyl guys who have variable camshaft your world is another 2 orders of magnitude more complex) becuase the Intake and Exhaust cam terms are not zero.
If you open an early E38 file, under Engine Airflwo, Dynamic Airflow you will see the zone mapping thresholds and numbering.Here's the full formula for those that are interested:
VE = Constant + KMap².MAP² + KMap.MAP + KMapRPM.MAP.RPM + KMapEx.MAP.Ex + KMapIn.MAP.In + KRpm².RPM² + KRpm.RPM + KRpmEx.RPM.Ex + KRpmIn.RPM.In + KRpm.RPM + KEx².Ex² + KEx.Ex + KExIn.Ex.In + KIn².In² + KIn.In
where:
- Kxxx is the coefficient from the current zone
- MAP² is MAP squared
- MAP is MAP
- RPM is RPM
- RPM² is RPM squared
- Ex is Exhaust Cam Angle
- Ex² is Exhaust Cam Angle squared
- In is Intake Cam Angle
- In² is Intake Cam Angle squared
For the later code they eliminated the ability to map the zone #'s but the convention is the same as below.
Now most of you are wondering, why, for the love of god, would anyone think this is a better system than before? The answer is simple really, this mathematical approach gives a highly accurate result in the new multidimensional space created by adding the exhaust, intake camshaft and also the variable intake systems. For example, to do this the traditional way would require multiple VE tables for each camshaft, then some mehtod to mix the result and then another set of VE tables for each depending on the switched manifold state, not to mention you have DoD thrown in as well. ie. the old way being conservative assuming 5 VE tables for each cam position, three differnt states for the manifold switch and a couple of states for DoD. gives a total of 5 x 5 x 3 x 2 = 150 VE tables and then you still have a giant interpolation mess to deal with at the end. Not to mention you just blew out the size of the calibration a huge amount.
Unfortunately folks this is the way of the future, and this aspect of the PCM control is not the only thing headed this way - things like torque estimation, idle control and throttle control will all go this way eventually. Makes you wish you had paid attention in those engineering math classes
So where to begin?
So far you should have realized that the constant term is the only remotely intuitive part to the equation. Modifying these numbers effectively offsets each zone of the VE table up or down. ie. if you increase the constant term the VE value increases and the PCM will add more fuel. However, be warned that as soon as you change anything, the transition boundaries between zones will be out so don't move things too much or unexpected things may happen. The linear terms suchs as KMAP and KRPM multiply the current value of RPM or MAP, then you have the quadratic terms such as KMAP² and KRPM² which operate on the square of the MAP or RPM. You'll notice that these numbers are very small or zero, putting large numbers here will create major problems and/or instability.
You will also notice that in some cases the coeffcients are negative numbers, there's no reason they can;t be negative, it's just a mapping to a final result after all.
The good thing here is that in theory you can run 2bar without any operating system mods as the SD zones can be setup for boost as well, in fact some of the northstar engine calibrations do just that.
Good luck,
Chris...
PS. after SEMA i will put as much detail in plain english as possible in the help files, although i have struggled to even explain it to myself and i know the thoery and mathematics behind this stuff quite well.

 Reply With Quote
Reply With Quote





 in DOS
in DOS

 To do it properly need a fancy simulataneous equation solver or about a billion years manually. I think the MAF is the go to begin with
To do it properly need a fancy simulataneous equation solver or about a billion years manually. I think the MAF is the go to begin with



